After clicking the "Start" button the Heading simulation will start, and NMEA sentences will be sent to the selected output port of the PC, until the "Stop" button is pressed. Note that only those NMEA sentences will be sent that are checked in the "NMEA sentences" panel.
All sentences are shown in the I/O Port Monitor as they are output. When logging is ON (toolbar option), the sentences will also be written to the user selected log file.
Clicking the "Stop" button will suspend the operation, until "Start" is clicked again.
When the Transmit Interval is set to 0.0 the sentences are output as "single shot" each time you click the "Start" button.
Clicking the little X top-right will exit the object and save optionally all current values, so that next time the instrument is used it can continue where it stopped. Note: saving is an optional setting in the General Settings.
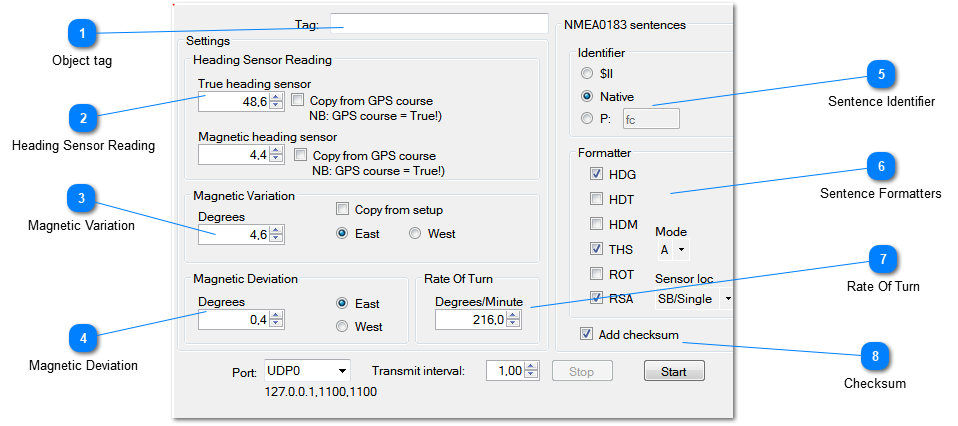
A short description of each field follows below.
Object tag
Optional, to give this instrument a name for easy identification.
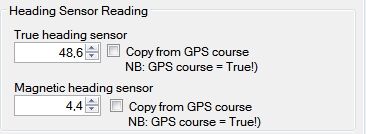
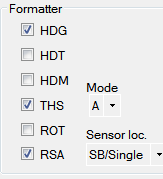
Two sensor types can be simulated: True heading and Magnetic heading.
The value from the True heading sensor goes straight into the HDT sentence.
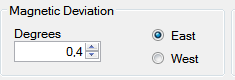
The value from the Magnetic sensor goes to the HDM sentence, but not before being compensated with magnetic variation and deviation.
The value for the True heading sensor can optionally be taken from a selected active GPS instrument. To achieve this, check the "Copy from GPS course" checkbox. A dropdown control will open showing all available active GPS instruments. Select the one required and the true heading will be taken from the course indicated by the GPS instrument. This can come in very handy if the GPS in question is sailing an automatic route.
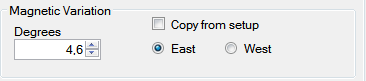
This is a paramater that corrects the Magnetic Heading.
Since this is normally a fairly constant value for a given sea area, you have the option of copying it from the General Settings so you do not need to set it again for each new intance of a weather instrument.
The Rate of Turn in degrees per minute. The value is reflected in the ROT sentence.
The value be adjusted by the up/down arrow buttons of the control, but also by using the main Rudder Control. When using the main Rudder Control, the the ROT value is calculated by dividing 708 by the maximum rudder setting and multipled by the value in the Rudder Control.
The value 708 is used for consistency with the maximum ROT value possible in AIS message 1.
Please notice you can change the range for the main Rudder Control in the General Settings. It is set to 30 degrees by default.